Key components

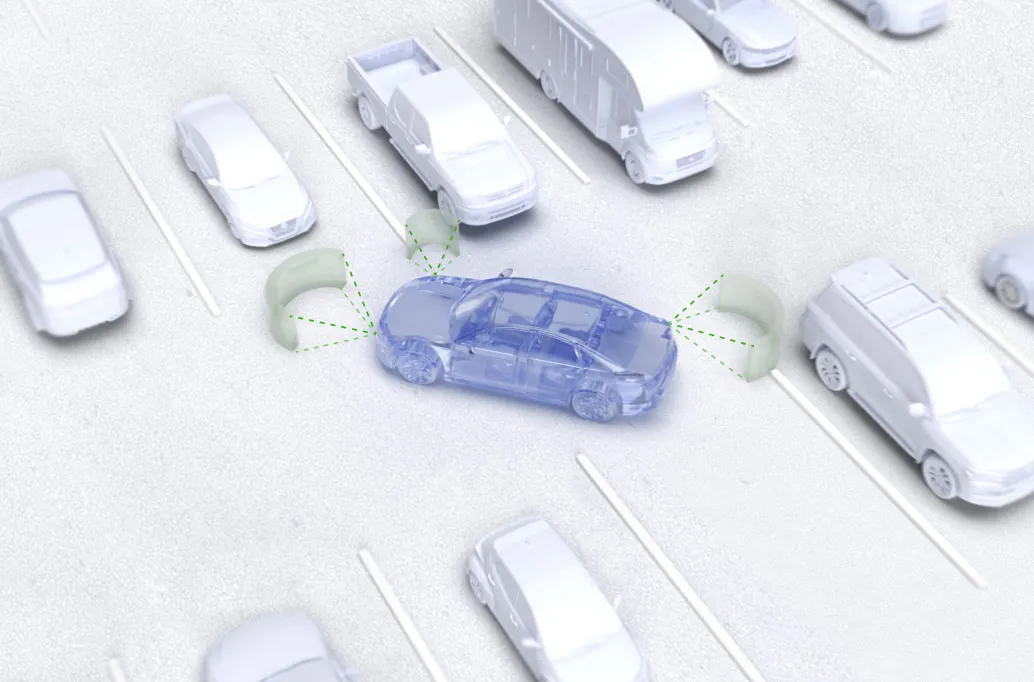
Sensor models
Physically accurate synthetic data generated with validated, hardware-specific sensor models.
Ground truth labels
Error-free ground truth labels in industry-standard formats.
Minimize the domain gap
Mitigate the simulation-to-real domain gap with parameters to tune sensor and material behavior and domain adaptations to remove synthetic-specific features.
Environmental variants
Procedurally generated parking structures with thousands of variations in parking spot markings, materials, vehicles, VRUs, and other ODD elements.
Scene diversity
Directly define distributions over all scene components such as environments, weather, and lighting to maximize diversity and target specific edge cases.
Global coverage
Regions include the U.S., Canada, Europe, Japan, China, South Korea, and more.


.webp)
.webp)
